
Flexible Manufacturing, Robotics and Automation
- Sheffield Research in Particle Physics and Particle Astrophysics
- Irradiation Facility Development and Operation
- Robotics and Autonomous Systems for Flexible Manufacturing
- Advanced Robotics Systems for Nuclear Decommissioning
- Machine Vision Systems for Flexible Manufacturing
- Contact
Advanced Robotics Systems for Nuclear Decommissioning
Dexterous Robotic System Development
Advanced Robotics for Nuclear Decommissioning
Publications
Introduction
The route to the High Luminosity LHC (HL-LHC) involves various detector upgrades and requires significant infrastructure changes. Recent measurements by CERN Radiation Protection, verifying previous calculations by the University of Sheffield (UoS), has raised awareness about the need to restrict human activity in the HL-LHC experimental construction and maintenance areas due to exposure from high levels of radiation. Examining the case of the ATLAS detector upgrade, the collaborative partnership between UoS and UK industry is developing state-of-the-art robotic instrumentation, capable of tolerating high radiation levels. The main object of this research is to study how materials and components of dexterous robotic systems behave under high levels of radiation. This is evaluated using novel robotic irradiation techniques and test methods. Elements of the Shadow Robot Company dexterous robotic manipulator were exposed to specific doses of radiation in a temperature controlled thermal chamber at the UK-ATLAS Irradiation Facility.Dexterous Robotic System Development
The latest developments in the field of humanoid robotics allows tasks to be carried out with unprecedented accuracy. Considering the above statement, robots effectively replace humans in high precision tasks and remove them from an environment which is potentially dangerous. This includes hazardous environments such as radiation, and is applicable to industrial applications such as nuclear power generation, medical isotope production and pharmaceutical facilities.The Shadow Robot Company dexterous Hand is an advanced humanoid robotic system that can execute up to 24 movements, reproducing as close as possible, the motion and dexterity of a human hand. It has been designed to provide comparable force output and precision to a human hand which is verified by The Southampton Hand Assessment Procedure (SHAP), a clinically validated hand function test originally developed to assess the effectiveness of upper limb prostheses. Shadow Hand systems have been used, among others, in manipulation and handling of hazardous materials.
The Shadow Hand is a self-contained system; all actuation and sensing components are built into the hand and forearm, which use an EtherCAT bus technology to communicate with a control computer. The whole system is fully integrated into a Robot Operating System (ROS).

|
|
|
The fingers of the E1M3R (right hand) model use Shadow's electric "Smart Motor" actuation system. The "Smart Motor" integrates force and position control electronics, motor drive electronics, motor, gearbox, force sensing and communications into a compact module, 20 of which are packed into Hand's base. Each of the 20 nodes drives a Maxon motor using PWM and implements a PID controller, which can be set control the force on the tendons at the motor end or the position on the joints.
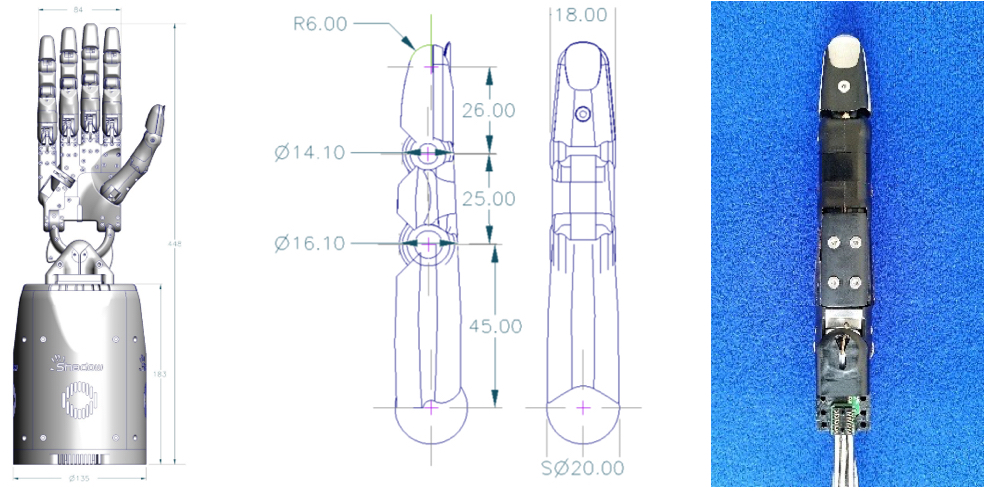
The Hand has been designed to be similar in shape and size to a typical male hand and reproduce closely its kinematics. For economic reasons the fingers have all the same length with knuckles staggered to give compatible fingertip locations to a human hand.
Advanced Robotics for Nuclear Decommissioning
The decommissioning of the ATLAS Inner Detector, around two months after the LHC shutdown, will occur in a high radiation environment, as simulations and measurements predict. Specifically, a dose of 1100 µSv/h is expected at 10 cm distance from the centre of the beam pipe which falls in a gradient to reach 90 µSv/h at 200 cm. ATLAS safety standards imply that the personnel should not exceed a dose of 2 mSv for 12 consecutive months while no exposure higher than 50 µSv is allowed. According to these regulations, humans can only work for very limited periods in this environment with strict monitoring. Thus the ATLAS Tracker Upgrade community is now examining the plausibility of humanoid robotic technology to manipulate detector components that are space-constrained and hazardous to work with.To evaluate and verify the durability of the Shadow Robot Company dexterous robotic Hand in elevated radiation environments, irradiation tests are performed using the UK-ATLAS Irradiation Facility. To simplify testing, a single finger or end effector of the dexterous robot has been selected for examination. After identifying the construction materials of the robot, an estimation of the required irradiation period was established using both previous research knowledge and simulations.
To be able to precisely study how material of the robotic hand system behaves after radiation, the materials of the finger have been determined. Dimensions of each component, weight and the radiation dose along with the operational time, are needed for simulations to predict the fluence that the materials need to tolerate.
| Robotic Finger Component | Material | Estimated distance from beam pipe (cm) | Estimated radiation dose (µSv/h) |
| Structure and Bearings | Polyoxymethylene, Aluminium, Stainless steel | 10 | 1100 |
| Tendons | UHMWPE | 12 | 1020 |
| Flesh | Polysiloxane elastomer material | 10 | 1100 |
| Tactile sensors | Semiconductor structure | 10 | 1000 |
| Wires and tubes | Copper, plastic, rubber | 11 | 1060 |
| PCBs | SMD Semiconductors, soldering filler, copper | 13 | 970 |
Publications
E. Kourlitis, R.French, H.Marin-Reyes, Radiation Exposure Assessment of a Robot Hand, 19th International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines (CLAWAR 2016), (2016).